-
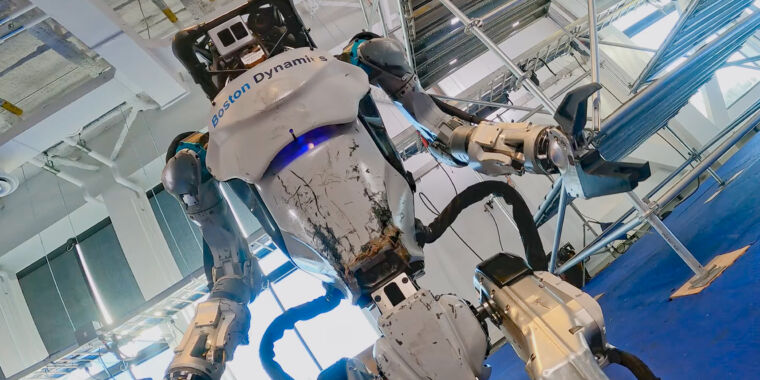
“Beri mereka tanda kurung!” Atlas sekarang memiliki sepasang cakar grapple. Mungkin juga saatnya untuk penutup batang tubuh baru.
Dinamis Boston
-
Tangan Atlas sebelumnya adalah bantalan atau bola datar, yang keduanya hanya bisa mengambil benda dengan tekanan.
-
Cakar, dari dekat. Dalam gambar ini, hanya “jempol” bagian atas yang bergerak. Lihat juga kerusakan yang dilakukannya pada papan ini. Itu tidak lembut.
-
Angkat dengan kaki Anda!
Atlas Boston Dynamics – robot humanoid tercanggih di dunia – sedang mempelajari beberapa trik baru. Perusahaan akhirnya mendapatkan Atlas di tangan kanan, dan di Boston Dynamics video YouTube terbaru, Atlas mencoba untuk benar-benar bekerja. Itu juga merilis yang lain Video di balik layar menunjukkan beberapa pekerjaan yang masuk ke Atlas. Dan ketika segala sesuatunya tidak berjalan dengan baik, kami melihat beberapa pukulan spektakuler yang dilakukan robot dalam upayanya untuk memajukan robotika humanoid.
Sebagai robot humanoid, Atlas berfokus terutama pada penggerak, dimulai dengan berjalan di lab, lalu berjalan di setiap jenis medan tidak stabil yang dapat dibayangkan, dan kemudian sesuatu. trik parkour yang sakit. Penggerak adalah semua tentang kaki, dan bagian atas tampak seperti renungan untuk sebagian besar, menggunakan lengan hanya untuk mengayun untuk keseimbangan. Atlas bahkan belum pernah melakukannya sebelumnya Tangan-Terakhir kali kami melihatnya, hanya ada dua tangkapan bola yang tampak tidak lengkap di ujung lengannya.
Robot versi terbaru ini memiliki grippers yang nyata. Itu adalah tangan penjepit sederhana dengan pergelangan tangan dan satu jari yang dapat digerakkan, tetapi itu cukup untuk mengambil barang. Tujuan video ini adalah memindahkan objek yang “relevan secara inersial” – tidak hanya mengangkat lightbox, tetapi objek yang cukup berat untuk membuat Atlas kehilangan keseimbangan. Ini termasuk hal-hal seperti papan besar, tas penuh alat, dan barbel dengan dua pemberat 10 pon. Atlas mempelajari semua tentang “kekuatan yang sama dan berlawanan” di dunia ini.
Seperti segala sesuatu dalam robotika, mengambil dan membawa benda lebih rumit dari yang terlihat. Atlas harus mencari tahu di mana dia berada di dunia dalam kaitannya dengan objek yang dia ambil, menyusun rencana mencengkeram tangan, dan mengangkat serta memanipulasi objek sambil juga menghitung bagaimana massa ekstra itu akan memengaruhi keseimbangannya. Seperti yang dijelaskan oleh insinyur perangkat lunak Boston Dynamics, Robin Deits dalam video, “Ketika kami mencoba memanipulasi sesuatu seperti papan, yang harus kami lakukan adalah membuat tebakan yang cukup cerdas tentang di mana papan itu berada, seberapa cepat ia bergerak, dan bagaimana kami memilikinya. untuk menggerakkan lengan untuk membuat papan berputar 180 derajat dengan sangat cepat dan jika tebakan kami salah, kami akhirnya melakukan hal bodoh dan terjatuh.
Namun, Atlas tidak hanya kikuk mengambil dan membawa barang. Ia berlari, melompat dan berputar sambil membawa benda berat. Pada satu titik ia melompat dan melempar kotak perkakas yang berat ke mitra konstruksinya tanpa kehilangan keseimbangan. Dia melakukan semua ini pada perancah reyot dan trotoar papan yang diimprovisasi, sehingga tanah di bawah kaki Atlas terus bergeser di setiap langkah. Mengambil barang adalah awal dari mengajari robot untuk melakukan pekerjaan yang sebenarnya, dan terlihat seperti di rumah sendiri di lokasi kerja yang kasar. Namun, pegangan cakar dasar berarti Atlas akan menghancurkan apa pun yang dia ambil, dengan benda-benda seperti papan yang menunjukkan kerusakan yang terlihat di mana tangan menggali ke dalamnya. Mungkin eksperimen selanjutnya akan mengajarkan Atlas untuk tidak seperti gorila raksasa.

Penggemar zombie. Penggemar kopi ramah. Praktisi bir. Ahli web total. Ahli TV jahat
You may also like
-
Meta Quest 3 menampilkan penyesuaian bantuan mata
-
Pembuat Dwarf Fortress telah menghasilkan lebih dari $7 juta dalam sebulan sejak Steam diluncurkan
-
Larangan Microsoft Windows 10 diikuti oleh cara baru untuk membuat Anda memutakhirkan
-
Pengeditan profesional RAW Lightroom disinkronkan dengan Galaxy S23 dan Book 3
-
Pokemon HOME versi 2.1.0 live di ponsel sekarang, berikut adalah patch notesnya